RS232串口的Windows编程纪要
VC6 AND RS232

再次是一篇入门文,各路神仙退散。
直接进入主题,又不是历史课,关于RS232那些前世今生的故事就不摆了。
硬件链接
首先以9针小口为例(大口应当只能去博物馆看了吧)看一下管脚排布,其实RS232本身没进博物馆都已经够让我惊讶了。
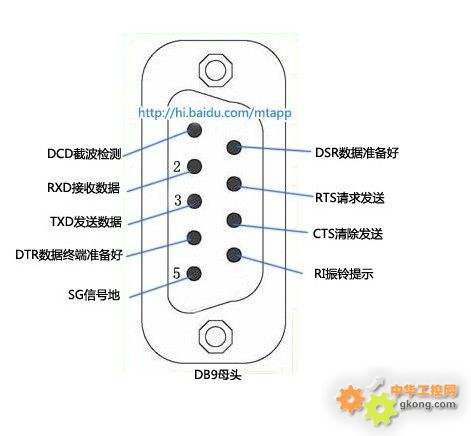 (图片来自互联网)
(图片来自互联网)
通常使用的接线图:
 (图片来自互联网)
(图片来自互联网)
硬件接口部分的重点:
- 绝大多数情况下,我们只需要接2号、3号、5号,RXD/TXD/SG三根线就能正常工作。(顺便多说一句,古老的大串口是2、3、7号)
- 直连模式一般用于延长线或者大小口的转换线。
- 交叉线是用于连接电脑之间、电脑与设备之间,是最主要的应用方式。
- 通常三根线就能工作,但并不表示其它信号就没用,甚至像某些书上说的都没有定义。
硬件支持
当前我们常用的电脑,在台式机上一般都会有串口,可以直接使用。
绝大多数的笔记本电脑都已经没有了串口,想使用串口通常都是使用USB接口的适配器。顺便说一句,USB实际也是另外一种串口,SATA也是,只是未成文的约定俗称上,串口特指了RS232接口或者485接口。
USB适配器通常也分两种,一种是内置于外置设备中的适配器,比如外置GPS模块、烧录机。另外一种则是仅有串口功能的独立适配器,今天的实验中我们会使用后者。
驱动程序
本身主板已经具有的串口都已经有了良好的设备驱动,鲜见不可用者。
USB外置的串口则绝大多数都需要另外安装驱动,Windows/Linux/macOS都是如此,依据适配器的芯片不同,所使用的驱动也不一样。这个在采购的时候就需要了解好。比如我测试的这款是PL2302芯片,使用win10内置的微软2017版驱动(不不不,不是你想的那样免驱动,继续看)。
因为串口无论如何算是一个比较有历史的技术,所以在x64的系统中大多支持不好,PL2302为例,在win10x64系统中会自动识别并安装驱动,但驱动安装完成仍然会有一个叹号表示设备不能正常工作,错误代码10。
搜索互联网能找到第三方提供的补丁,原厂商已经发布通知说PL2302已经停止支持了。补丁程序安装后运行还会先下载.net的运行时间库,随后才能完成驱动的补丁工作。
此仅为举例,不同的适配器,需要的驱动、安装方式都不会一样。
实验环境准备
串口作为通讯设备,实验需要发送、接受两个端。所以最好的实验方法是一台电脑上,用两个串口,一个模拟接收,一个模拟发送。当然如果你不缺电脑、不缺空间、不缺时间,使用两台电脑看上去肯定会更高大上。
各类操作系统都支持多个USB串口适配器同时工作,并识别为不同的串口设备和串口编号。
所以你要做的是:
- 在不连接USB串口适配器的情况下(通常要求如此)安装正确的设备驱动。
- 根据驱动安装的要求,看是否需要重启系统。
- 在没有安装适配器的情况下,Windows到设备管理工具中,macOS则记录/dev路径下tty开头的设备。
- 连接USB串口适配器,再次到上述相应位置,查看是否增加了串口设备,如果没有增加,返回检查驱动程序甚至适配器硬件。如果有增加,记录下来端口号,以供后续编程使用。
- 使用带接线端子的杜邦线,用上图中交叉连接的方式,连接两个适配器的GND-GND/RX-TX/TX-RX。如果感觉插在电脑上不好接线,也可以先将两个适配器接好线再插入电脑USB。
- 要么你的两个USB口离的足够近,要么你的杜邦线足够长,总之要保证连接稳定可靠。顺便,如果USB不够多,使用USB集线器也可以正常工作。
开发工具部分,因为学校的教学限定,使用VC6。作为一个追求时尚的unix fans,被逼回到这个太祖级的编程环境我也是有够纠结:(
RS232编程之旅
通常的教程都会从底层写起,细致的构建起整个的系统。而我比较相反,首先从c语言的main主函数的代码讲起:
// 为了清晰结构,代码有删减,但能正常运行
//
#include "serialport.h"
#include<string.h>
int main(int argc, char* argv[])
{
//定义两个句柄,用来报错打开后的两个串口相关资源信息
//句柄是编程中常用的说法,通常都表示指向一堆数据的标志
HANDLE h1,h2;
//定义一个字符串,字符串的内容其实无所谓,用于演示串口通讯的内容
char *msg="Hello, human!\n";
//要传输的数据的长度
int n=strlen(msg);
//一个串口接受用的缓冲区,100是随意给出的,只要大于通讯对端一次传输的数据量即可
char buf[100];
//首先将接受缓冲区清空,在正常、确定长度的数据传输中,这一步并不必要
//但在字符串传输的演示中,还是需要清空的,以保证在串味没有乱字符出现
memset(buf,0,100);
//给用户一个提示,表示传输测试开始了,因为至少以今天的眼光看,串口速度还是很慢的
printf("Serial port test begin ...!\n");
//打开并设置发送端串口,后面的串口编号是在设备管理器中查询到的
//在正式的系统中,这个串口通常会由用户在参数设置中修改
//Uart是英文中对串口的另外一个称呼,serial port/com也是同义
SetupUart(&h1,"com7");
//打开并设置接收端串口
SetupUart2(&h2,"com8");
//在发送端口写出数据,也就是我们准备的字符串
//串口通讯可以容纳的内容范围很广,不仅是字符串,所以使用unsigned char类型
WriteUart((unsigned char*)msg,n,h1);
//在接受端口读取数据,注意因为接收是阻塞式的,所以读取的长度要<=发送的数据包长度,
//否则会让程序阻塞在这里一直等待读取
ReadUart((unsigned char*)buf,n,h2);
//显示接收到的数据内容
printf("Loop received:%s",buf);
//关闭两个打开的串口
CloseUart2();
CloseUart();
return 0;
}
上面代码的注释非常详细,归纳串口操作的步骤为:
- 打开并设置串口。
- 写入或者读取数据。
- 关闭串口。
接下来看细节,也就是串口操作的部分:
//以下代码原型来自MSDN官方示例,为了保持原始代码的风格,尽量不做改动
//代码中有很多东西超出一般学习的范围,比如多线程的事件同步等,可以先大概了解即可
//对于不熟悉的代码,初期可以抄过来用,了解对外的API即可,有时间再去下功夫了解细节
#include "serialPort.h"
DCB PortDCB;
COMMTIMEOUTS CommTimeouts;
HANDLE hPort1,hPort2;
char lastError[1024];
//以下是一些端口设置使用的常量,在正常项目中应当也是归集于配置系统中的
//串口顾名思义是将数据串流化通讯,因此需要定义发送、接收方都完全相同的速度、位长、校验模式等
//另外因为我们只用了三根数据线,其它控制位的设置我们就省略掉了
//这些常量参数使用index*这样的方式是为了同传统界面上的各项设置做的对应,变量命名嘛,不用过于纠结。
int index1=4,//9600
index2=3,//8
index3=2,//NOPARITY
index4=0,//ONSTOPBIT
index5=-1;
//打开并且设置串口
int SetupUart(HANDLE *hPort,char *port1)
{
//打开串行端口,也是把端口当做一个文件来对待
//对于新手,为什么用这个函数之类的问题,只能先死记了
hPort1 = CreateFile (TEXT(port1), // Name of the port
GENERIC_READ | GENERIC_WRITE, // Access (read-write) mode
0,
NULL,
OPEN_EXISTING,
FILE_ATTRIBUTE_NORMAL,
NULL);
//打开失败就报个警并退出后续操作
if ( hPort1 == INVALID_HANDLE_VALUE )
{
MessageBox (NULL, "Port Open Failed" ,"Error", MB_OK);
return 0;
}
*hPort = hPort1;
//读取当前串口的状态
PortDCB.DCBlength = sizeof (DCB);
GetCommState (hPort1, &PortDCB);
//在当前串口状态的基础上设置串口速率等参数
configure();
//读取当前超时设置
GetCommTimeouts (hPort1, &CommTimeouts);
//根据当前超时设置,设置自己期望的值
configuretimeout();
//Re-configure the port with the new DCB structure.
//上面的configure只是设置了参数结构,下面函数才是真正将之设置到串口
if (!SetCommState (hPort1, &PortDCB))
{
MessageBox (NULL, "1.Could not create the read thread.(SetCommState Failed)" ,"Error", MB_OK);
CloseHandle(hPort1);
return 0;
}
// Set the time-out parameters for all read and write operations on the port.
//同样设置configuretimeout输出的结果
if (!SetCommTimeouts (hPort1, &CommTimeouts))
{
MessageBox (NULL, "Could not create the read thread.(SetCommTimeouts Failed)" ,"Error", MB_OK);
CloseHandle(hPort1);
return 0;
}
// Clear the port of any existing data.
//如果串口还有以前通讯积累的未完结数据,清理掉
if(PurgeComm(hPort1, PURGE_TXCLEAR | PURGE_RXCLEAR)==0)
{ MessageBox (NULL, "Clearing The Port Failed" ,"Message", MB_OK);
CloseHandle(hPort1);
return 0;
}
//MessageBox (NULL, "Port1 SETUP OK." ,"Message", MB_OK);
return 1;
}
//下面函数功能同上面的完全一样,其实设置一个函数就好,这里保持原状
int SetupUart2(HANDLE *hPort,char *port2)
{
//int STOPBITS;
hPort2 = CreateFile (TEXT(port2), // Name of the port
GENERIC_READ | GENERIC_WRITE, // Access (read-write) mode
0,
NULL,
OPEN_EXISTING,
FILE_ATTRIBUTE_NORMAL,
NULL);
if ( hPort2 == INVALID_HANDLE_VALUE )
{
MessageBox (NULL, "Port Open Failed" ,"Error", MB_OK);
return 0;
}
*hPort = hPort2;
// Initialize the DCBlength member.
PortDCB.DCBlength = sizeof (DCB);
// Get the default port setting information.
GetCommState (hPort2, &PortDCB);
configure();
// Retrieve the time-out parameters for all read and write operations
GetCommTimeouts (hPort2, &CommTimeouts);
configuretimeout();
//Re-configure the port with the new DCB structure.
if (!SetCommState (hPort2, &PortDCB))
{
MessageBox (NULL, "1.Could not create the read thread.(SetCommState Failed)" ,"Error", MB_OK);
CloseHandle(hPort2);
return 0;
}
// Set the time-out parameters for all read and write operations on the port.
if (!SetCommTimeouts (hPort2, &CommTimeouts))
{
MessageBox (NULL, "Could not create the read thread.(SetCommTimeouts Failed)" ,"Error", MB_OK);
CloseHandle(hPort2);
return 0;
}
// Clear the port of any existing data.
if(PurgeComm(hPort2, PURGE_TXCLEAR | PURGE_RXCLEAR)==0)
{ MessageBox (NULL, "Clearing The Port Failed" ,"Message", MB_OK);
CloseHandle(hPort2);
return 0;
}
//MessageBox (NULL, "Port2 SETUP OK." ,"Message", MB_OK);
return 1;
}
//PortDCB是全局变量,这里根据读取到的端口状态,设置自己希望的通讯参数
int configure()
{
// Change the DCB structure settings
PortDCB.fBinary = TRUE; // Binary mode; no EOF check
PortDCB.fParity = TRUE; // Enable parity checking
PortDCB.fDsrSensitivity = FALSE; // DSR sensitivity
PortDCB.fErrorChar = FALSE; // Disable error replacement
PortDCB.fOutxDsrFlow = FALSE; // No DSR output flow control
PortDCB.fAbortOnError = FALSE; // Do not abort reads/writes on error
PortDCB.fNull = FALSE; // Disable null stripping
PortDCB.fTXContinueOnXoff = TRUE; // XOFF continues Tx
//设置波特率
switch(index1) // BAUD Rate
{
case 0:
PortDCB.BaudRate= 115200;
break;
case 1:
PortDCB.BaudRate = 19200;
break;
case 2:
PortDCB.BaudRate= 38400;
break;
case 3:
PortDCB.BaudRate = 57600;
break;
case 4:
PortDCB.BaudRate = 9600;
break;
default:
break;
}
//设置通讯字节位长
switch(index2) // Number of bits/byte, 5-8
{
case 0:
PortDCB.ByteSize = 5;
break;
case 1:
PortDCB.ByteSize = 6;
break;
case 2:
PortDCB.ByteSize= 7;
break;
case 3:
PortDCB.ByteSize=8;
break;
default:
break;
}
//校验方式
switch(index3) // 0-4=no,odd,even,mark,space
{
case 0:
PortDCB.Parity= EVENPARITY;
break;
case 1:
PortDCB.Parity = MARKPARITY;
break;
case 2:
PortDCB.Parity = NOPARITY;
break;
case 3:
PortDCB.Parity = ODDPARITY;
break;
case 4:
PortDCB.Parity = SPACEPARITY;
break;
default:
break;
}
//停止位
switch(index4)
{
case 0:
PortDCB.StopBits = ONESTOPBIT;
break;
case 1:
PortDCB.StopBits = TWOSTOPBITS;
break;
default:
break;
}
//是否使用硬件流控制等
switch(index5)
{
case 0:
PortDCB.fOutxCtsFlow = TRUE; // CTS output flow control
PortDCB.fDtrControl = DTR_CONTROL_ENABLE; // DTR flow control type
PortDCB.fOutX = FALSE; // No XON/XOFF out flow control
PortDCB.fInX = FALSE; // No XON/XOFF in flow control
PortDCB.fRtsControl = RTS_CONTROL_ENABLE; // RTS flow control
break;
case 1:
PortDCB.fOutxCtsFlow = FALSE; // No CTS output flow control
PortDCB.fDtrControl = DTR_CONTROL_ENABLE; // DTR flow control type
PortDCB.fOutX = FALSE; // No XON/XOFF out flow control
PortDCB.fInX = FALSE; // No XON/XOFF in flow control
PortDCB.fRtsControl = RTS_CONTROL_ENABLE; // RTS flow control
break;
case 2:
PortDCB.fOutxCtsFlow = FALSE; // No CTS output flow control
PortDCB.fDtrControl = DTR_CONTROL_ENABLE; // DTR flow control type
PortDCB.fOutX = TRUE; // Enable XON/XOFF out flow control
PortDCB.fInX = TRUE; // Enable XON/XOFF in flow control
PortDCB.fRtsControl = RTS_CONTROL_ENABLE; // RTS flow control
break;
default:
break;
}
return 1;
}
int configuretimeout()
{ //超时设置,放置读写端口时时间过长程序挂起
//memset(&CommTimeouts, 0x00, sizeof(CommTimeouts));
CommTimeouts.ReadIntervalTimeout = 50;
CommTimeouts.ReadTotalTimeoutConstant = 50;
CommTimeouts.ReadTotalTimeoutMultiplier=10;
CommTimeouts.WriteTotalTimeoutMultiplier=10;
CommTimeouts.WriteTotalTimeoutConstant = 50;
return 1;
}
int WriteUart(unsigned char *buf1, int len,HANDLE hPort)
{
DWORD dwNumBytesWritten;
//使用写文件的方式向串口输出数据
//因为串口芯片及驱动程序都有缓存,所以一般小数据量的写出都不会阻塞
WriteFile (hPort,buf1, len,&dwNumBytesWritten,NULL);
if(dwNumBytesWritten > 0)
{
//MessageBox (NULL, "Transmission Success" ,"Success", MB_OK);
return 1;
}
else
{
MessageBox (NULL, "Transmission Failed" ,"Error", MB_OK);
return 0;
}
}
int ReadUart(unsigned char *buf2,int len,HANDLE hPort)
{
//BOOL ret;
DWORD dwRead;
BOOL fWaitingOnRead = FALSE;
OVERLAPPED osReader = {0};
unsigned long retlen=0;
// Create the overlapped event. Must be closed before exiting to avoid a handle leak.
//读取串口的时候,如果对方尚未发送指定长度的数据,会导致读取串口阻塞
//这里使用线程同步的事件响应方式,防止读取数据阻塞
//所以读取串口可能返回0表示没有读取到数据
//或者小于期望读取的字节表示数据尚未完全到来
osReader.hEvent = CreateEvent(NULL, TRUE, FALSE, NULL);
if (osReader.hEvent == NULL)
MessageBox (NULL, "Error in creating Overlapped event" ,"Error", MB_OK);
if (!fWaitingOnRead)
{
//具体的读取数据
if (!ReadFile(hPort, buf2, len, &dwRead, &osReader))
{
FormatMessage(FORMAT_MESSAGE_FROM_SYSTEM | FORMAT_MESSAGE_IGNORE_INSERTS,
NULL,
GetLastError(),
MAKELANGID(LANG_NEUTRAL, SUBLANG_DEFAULT),
lastError,
1024,
NULL);
MessageBox (NULL, lastError ,"MESSAGE", MB_OK);
}
else
{
// MessageBox (NULL, "ReadFile Suceess" ,"Success", MB_OK);
}
}
if(dwRead > 0)
{
//MessageBox (NULL, "Read DATA Success" ,"Success", MB_OK);//If we have data
return (int) retlen;
}
//return the length
else return 0; //else no data has been read
}
//关闭端口,同样有一个就够了
int CloseUart()
{
CloseHandle(hPort1);
return 1;
}
int CloseUart2()
{
CloseHandle(hPort2);
return 1;
}
在串口的编程中,打开串口、读写串口、关闭串口都是通常的文件操作,也就是把串口当做一个文件的方式进行处理。
只有串口的设置部分(本程序中是跟打开串口放在一起)是同传统文件操作不相同的。
第二个不同则是,通常的硬盘文件读写,速度都很快,不需要考虑阻塞问题。而串口是非常慢的设备,需要考虑阻塞问题的额外处理。
一般的初学者在这部分不需要太过纠结具体的过程,做到一般了解后。把良好运行的样本程序按照自己习惯封装、保存起来,用到的时候抄过来用即可。
